
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 |
- Laser Engraver
- GRBL
- 3D modeling
- XY Plotter
- Drawing Robot
- 원격제어
- 3D Printer
- CnC
- Robonoid
- Arduino
- esp8266
- concept
- WiFi Control
- WeMos D1 mini
- 카메라
- AxiDraw
- remote control
- 4xiDraw
- Web Control
- Bluetooth Control
- 3D Design
- 3D Printing
- raspberry pi
- miniMe
- Robot Platform
- CoreXY
- Drawing Machine
- 라즈베리파이
- 로봇
- Balancing Robot
- Today
- Total
목록Balancing Robot (5)
Zalophus's DesignHouse
 miniMe™ Balancing Bot SG90 Servo Motor Type Concepts
miniMe™ Balancing Bot SG90 Servo Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: SG90 servo motor type
 miniMe™ Balancing Bot N20 Motor Type Concepts
miniMe™ Balancing Bot N20 Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: N20 motor type
 miniMe™ Balancing Bot TT Motor Type Concepts
miniMe™ Balancing Bot TT Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: TT motor type
 ProfileBlock™ - DIY Robot Platform - Design Concepts
ProfileBlock™ - DIY Robot Platform - Design Concepts
[ Upload design concept 20170418]ProfileBlock - DIY Robots & Rover & RC & Etc. Platform 3D Design Tool: SketchUp ProProfileBlock's robots are built on top of an open source Arduino-based(with ESP8266, Raspberry Pi) platform. drawBot: Drawing Robot (Polargraph, Pen, ...RoverSelf Balancing Robot (eX-Robot, B-Robot, Roverbot, ...eX-Robot: http://brobot.tistory.com/15https://youtu.be/yUEGPzcLrT0http..
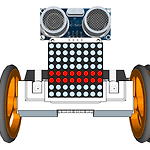
 ESPway | A Segway-style WiFi controlled robot built on ESP8266
ESPway | A Segway-style WiFi controlled robot built on ESP8266
Ever since I started tinkering with Arduino and embedded systems, I’ve been pretty excited about building a self-balancing, Segway-like robot. There’s a wealth of similar projects and resources around the Internet.The first prototype was built inside a plastic lunch box. It used an Arduino Nano and infrared remote control. It used the MPU6050 inertial measurement unit for detecting the orientati..