
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- AxiDraw
- 로봇
- XY Plotter
- Web Control
- 4xiDraw
- Robot Platform
- Robonoid
- 카메라
- Arduino
- esp8266
- 3D modeling
- Drawing Robot
- 원격제어
- CoreXY
- WiFi Control
- 3D Printing
- 3D Design
- GRBL
- concept
- Laser Engraver
- Balancing Robot
- 라즈베리파이
- remote control
- Bluetooth Control
- raspberry pi
- CnC
- miniMe
- Drawing Machine
- WeMos D1 mini
- 3D Printer
- Today
- Total
목록raspberry pi (10)
Zalophus's DesignHouse
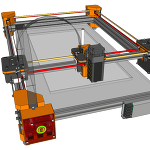 iDraw Pro V1 Drawing Machine (CoreXY) - Laser Cutter and Engraver - Design Concept - 20190309
iDraw Pro V1 Drawing Machine (CoreXY) - Laser Cutter and Engraver - Design Concept - 20190309
___ Drawing Machine - iDraw Pro - ProfileBlock™ - CoreXY - Dual mode: Pen drawing / Laser Cutter and Engraver ___ 3D Design Tool: SketchUp ProThe long awaited extended-travel iDraw Pro! Usable pen travel (millimeters): 544 × 300 mmiDraw Pro follows the frame and structure of 4xiDraw V1(http://shop.bluecomtech.com/product/4xidraw-v1-a3). iDraw Pro is an XY plotter using the CoreXY method. Easy to..
 3D Printed Humanoid Robot – Robonoid – LineUp – 20180621
3D Printed Humanoid Robot – Robonoid – LineUp – 20180621
[20190107] Upload Links [20181101] Printing [20180621] Update Design concept [20180619] Update Design concept [20180607] Update Design concept [20180604] Update Design concept [20180430] Design concept Humanoid Robot – Robonoid – Design concept 3D Design Tool: SketchUp Pro Robonoid is small sized bipedal walking robot The robot has 17 or 19, 24 freely moveable joints and servomotor in order to p..
 3D Printed Hexapod Robot – Robonoid – H1 – Design concept – Update – 20180621
3D Printed Hexapod Robot – Robonoid – H1 – Design concept – Update – 20180621
___ Hexapod Robot – Robonoid – H1 -Design concept ___ Update design concept 20180621] – Parts Update: pinshape: https://pinshape.com/items/46664[ Upload parts 20170418][ Upload design concept 20161001]https://pinshape.com/items/26844___Project Hexapod Robot - H1 - Body Top & Bottom___3D Printer: PANDORA DXs - DIY Desktop 3D PrinterSlicer: Cura 15.04.2 Layer height (mm): 0.1 Shell thickness (mm):..
If you have used the Sleepy Pi setup script you DO NOT need to do this. The script has already set this up for you.Contents [hide]1 Setting up the Serial Pins1.1 Step 1: Disable Serial login1.1.1 Wheezy1.1.2 Jessie and Raspberry Pi 31.2 Step 2. Disable Boot info1.3 Step 3. Link the Serial port to the Arduino IDE2 Setting up the Reset (DTR) pin3 Adding the Sleepy Pi to the Arduino environment4 Re..
 PANDORA Junior DXs - 3D Design Concept
PANDORA Junior DXs - 3D Design Concept
DIY 3D Printer - PANDORA Junior DXs (Design eXtreme single)3D Design Tool: SketchUp ProTechnical SpecificationsPrintingTechnology: FFF(Fused Filament Fabrication) / CoreXY Build Volume: 223 (W) x 207 (D) x 250 (H) mm - Heatbed Layer Resolution: 50 ~ 200 microns Filament: ABS or PLA, Nyron, HIPS, PVA... 1.75 mm diameter Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm) Print File Type: .Code, .STL La..
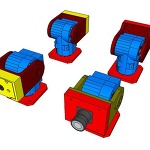 Super Ultra Compact Pan/Tilt Camera Mount - V2
Super Ultra Compact Pan/Tilt Camera Mount - V2
[Publish 20161001]New Version Super Ultra Compact Pan/Tilt Camera Mounthttps://www.thingiverse.com/thing:1799905Old Versions: V1https://www.thingiverse.com/thing:1242570https://www.thingiverse.com/thing:350229 This pan-tilt kit is the perfect way to give your project full range motion with two micro servos. The pan-tilt can rotate roughly 180° from side-to-side and can tilt up&downwards around 1..
 ProfileBlock™ - DIY Robot Platform - Design Concepts
ProfileBlock™ - DIY Robot Platform - Design Concepts
[ Upload design concept 20170418]ProfileBlock - DIY Robots & Rover & RC & Etc. Platform 3D Design Tool: SketchUp ProProfileBlock's robots are built on top of an open source Arduino-based(with ESP8266, Raspberry Pi) platform. drawBot: Drawing Robot (Polargraph, Pen, ...RoverSelf Balancing Robot (eX-Robot, B-Robot, Roverbot, ...eX-Robot: http://brobot.tistory.com/15https://youtu.be/yUEGPzcLrT0http..
 DIY Delta 3D Printer - HexaBot
DIY Delta 3D Printer - HexaBot
DIY Delta 3D Printer - HexaBot 3D Design Tool: SketchUp Pro Technical Specifications Printing Technology: FFF(Fused Filament Fabrication) / Delta Build Volume: 95 (W) x 95 (D) x 135 (H) mm Auto running Heatbed Layer Resolution: 50-200 microns Filament: ABS or PLA, Nyron, HIPS, PVA... 1.75 mm diameter Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm) Print File Type: .Gcode, .STL Layer Resolutions: F..
 DIY 3D Printer PANDORA DXs
DIY 3D Printer PANDORA DXs
DIY 3D Printer - PANDORA DXs (Design eXtreme single) 3D Design Tool: SketchUp Pro Technical Specifications Printing Technology: FFF(Fused Filament Fabrication) / H-Bot(CoreXY) Build Volume: 223 (W) x 225 (D) x 165 (H) mm Heatbed Layer Resolution: 50-200 microns Filament: ABS or PLA, Nyron, HIPS, PVA... 1.75 mm diameter Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm) Print File Type: .Gcode, .STL L..
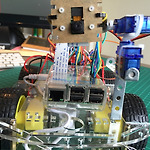 Internet 제어 Raspberry Pi Camera Rover (Robot)
Internet 제어 Raspberry Pi Camera Rover (Robot)
소개 이 프로젝트의 아이디어는 상기 프로세서로 라즈베리 파이를 사용하여 인터넷을 통해 완전히 제어 로봇을 생성하는 것이다. 로봇은 HTML로 작성된 웹 페이지에 의해 직접 제어 턴에있는 쉘 스크립트 작성 저수준의 명령을 사용하여 제어된다. 우리는 예를 들면 파이썬 같은 고급 언어를 사용하는 사실은, 로봇이 페이지 (인터넷 속도가 느린 경우에도)에 의해 수신 된 명령에 빠르게 반응하도록 야기된다. 아래 링크에서는 어떻게 완성 된 프로젝트를 볼 수 있습니다 이 프로젝트는 두 부분으로 분할하고, 배울 것 1 부에서한다 : 설치 및 GPIO가 RPI를 제어하는 라이브러리 WiringPi를 사용는 H-Bridge를 사용하여 제어 모터웹 서버의 RPI 변형인터넷을 통해 상기 로봇을 제어하기 위해 HTML (자바 스..