
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- 카메라
- Balancing Robot
- raspberry pi
- WeMos D1 mini
- 로봇
- CnC
- XY Plotter
- remote control
- Arduino
- Robonoid
- Robot Platform
- miniMe
- Bluetooth Control
- AxiDraw
- 4xiDraw
- 3D Printer
- 3D modeling
- 라즈베리파이
- WiFi Control
- 원격제어
- Laser Engraver
- 3D Printing
- 3D Design
- Drawing Robot
- esp8266
- Web Control
- concept
- Drawing Machine
- CoreXY
- GRBL
- Today
- Total
목록로봇 (10)
Zalophus's DesignHouse
 miniMe™ Rover Servo Motor Type Concepts
miniMe™ Rover Servo Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-Rover: Servo motor type
 miniMe™ Rover TT Motor Type Concepts
miniMe™ Rover TT Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-Rover: TT motor type
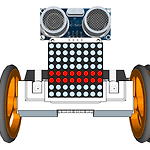
 miniMe™ Balancing Bot SG90 Servo Motor Type Concepts
miniMe™ Balancing Bot SG90 Servo Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: SG90 servo motor type
 miniMe™ Balancing Bot N20 Motor Type Concepts
miniMe™ Balancing Bot N20 Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: N20 motor type
 miniMe™ Balancing Bot TT Motor Type Concepts
miniMe™ Balancing Bot TT Motor Type Concepts
miniMe™ is 3D printing DIY mini robot platform miniMe-BB: TT motor type
 ProfileBlock™ - DIY Robot Platform - Design Concepts
ProfileBlock™ - DIY Robot Platform - Design Concepts
[ Upload design concept 20170418]ProfileBlock - DIY Robots & Rover & RC & Etc. Platform 3D Design Tool: SketchUp ProProfileBlock's robots are built on top of an open source Arduino-based(with ESP8266, Raspberry Pi) platform. drawBot: Drawing Robot (Polargraph, Pen, ...RoverSelf Balancing Robot (eX-Robot, B-Robot, Roverbot, ...eX-Robot: http://brobot.tistory.com/15https://youtu.be/yUEGPzcLrT0http..
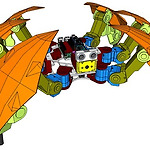 Project Hexapod Robot - H1 - Design concept
Project Hexapod Robot - H1 - Design concept
[ Update parts 20170418]Upload parts: pinshape: https://pinshape.com/items/26844[ Upload design concept 20161001]Project Hexapod Robot - H1 - Design concept3D Design Tool: SketchUp Prohttps://youtu.be/_rR-UHH5oTUParts ListCoxa: https://pinshape.com/items/345603 x Left3 x RightFemur: https://pinshape.com/items/345593 x Left Top3 x Left Bottom3 x Right Top3 x Right BottomPatella: https://pinshape...
 DIY Delta 3D Printer - HexaBot
DIY Delta 3D Printer - HexaBot
DIY Delta 3D Printer - HexaBot 3D Design Tool: SketchUp Pro Technical Specifications Printing Technology: FFF(Fused Filament Fabrication) / Delta Build Volume: 95 (W) x 95 (D) x 135 (H) mm Auto running Heatbed Layer Resolution: 50-200 microns Filament: ABS or PLA, Nyron, HIPS, PVA... 1.75 mm diameter Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm) Print File Type: .Gcode, .STL Layer Resolutions: F..
 DIY 3D Printer PANDORA DXs
DIY 3D Printer PANDORA DXs
DIY 3D Printer - PANDORA DXs (Design eXtreme single) 3D Design Tool: SketchUp Pro Technical Specifications Printing Technology: FFF(Fused Filament Fabrication) / H-Bot(CoreXY) Build Volume: 223 (W) x 225 (D) x 165 (H) mm Heatbed Layer Resolution: 50-200 microns Filament: ABS or PLA, Nyron, HIPS, PVA... 1.75 mm diameter Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm) Print File Type: .Gcode, .STL L..
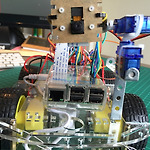 Internet 제어 Raspberry Pi Camera Rover (Robot)
Internet 제어 Raspberry Pi Camera Rover (Robot)
소개 이 프로젝트의 아이디어는 상기 프로세서로 라즈베리 파이를 사용하여 인터넷을 통해 완전히 제어 로봇을 생성하는 것이다. 로봇은 HTML로 작성된 웹 페이지에 의해 직접 제어 턴에있는 쉘 스크립트 작성 저수준의 명령을 사용하여 제어된다. 우리는 예를 들면 파이썬 같은 고급 언어를 사용하는 사실은, 로봇이 페이지 (인터넷 속도가 느린 경우에도)에 의해 수신 된 명령에 빠르게 반응하도록 야기된다. 아래 링크에서는 어떻게 완성 된 프로젝트를 볼 수 있습니다 이 프로젝트는 두 부분으로 분할하고, 배울 것 1 부에서한다 : 설치 및 GPIO가 RPI를 제어하는 라이브러리 WiringPi를 사용는 H-Bridge를 사용하여 제어 모터웹 서버의 RPI 변형인터넷을 통해 상기 로봇을 제어하기 위해 HTML (자바 스..